Week 8- Finally doing art
IN CLASS:
On Tuesday, we did our live presentation of progress for Paul. I was extremely proud of the work we did and all that we had accomplished, and he was predictably very disappointed. Pictured below: Cindy, our brave model, showing off the massive amount of work we've done so far, integrating:
- Two Kinect sensors
- Touch Designer
- Capacitive touch sensors
- Feather V2
- Unreal Engine
- UDP communication
- MIDI controllers
- The wifi, projection, and sound systems of the Motion Capture Lab
- The experience design of 11 beautiful people


I found it amusing that he was so critical of "how far we need to go" and how much "needs to be done" to "complete" the project given that 1.) he is continually moving the goalposts and 2.) such comments are completely antithetical to the conceit of the class as stated in week one, and as documented in the syllabus as follows: "The main purpose of this course is to provide students opportunities to experiment, to challenge, to be open, to fail/to succeed, to be adventurous, brave and courageous in thinking about the possibilities of media for the decades ahead." The emphasis on encouraging experimentation and failure is funny, given how displeased Paul is with the fact that all we've been doing is experimenting and failing, and then working very hard to surmount said failures. It turns out that this is apparently insufficient, and the actual goal of the class was secretly to complete a perfect polished final project. My mistake. I interpreted the last item on the syllabus-
- having an actual project that collectively brings your weekly investigations/work together, [sic]
-as meaning that we needed to have a project we were continuously working on, learning from, and improving upon. Apparently this actually constitutes a "generous C", implying that we actually deserve a D for the work we've done so far, despite fulfilling everything we've been requested to in the syllabus, since we aren't meeting Paul's arbitrarily assigned bar for "completion" (not part of the syllabus). I've been thinking a lot about how this class is designed to punish students with an artistic background and reward students with a tech background, and sets UX/UI and visual arts people up for failure by forcing us into group projects we do not want which require skills we do not yet have and force us to take a back seat for the majority of the course while the tech-saavy students are forced to overwork and carry us. It sucks, and is also perfectly reflective of the unacceptable politics and environment of the tech sector. Much to think about.
Anyway.
I spent the rest of the class doing a fitting of the bodysuit on Cindy, taking notes on where in needed to be taken in or altered, and then guiding discussion on what we needed to get done this week. We determined that our goals for next week would be:
- CONCEPT
- performance design from Puppet Masters perspective (Vivian)
- performance design from audience perspective (Lauren)
- goal: design and timeline document submitted to Paul by THU
- TOUCH
- full costume prototype with iterative testing (Kaenan, Preeti)
- configure UDP data reads into usable global variable for Unreal blueprints (Yash)
- goal: costume accurately changes discomfort Index value
- SOUND DESIGN
- formulate and implement clearer interactivity design (Nick, Vivian)
- goal: sound system working with touch triggers
- goal: documentation of design process
- VIRTUAL STAGING
- polished virtual stage and final avatar ()
- find textures related to degradation / distortion (Cindy, Michael)
- figure out how to layer textures for a gradual change effect (Cindy, Michael)
- find relevant VFX and design implementation (Lianna)
- test two-display output and in-camera effects (Lara)
- test collision detection with Kinect to trigger events (Lara, Varun)
- integrate Index to trigger events like VFX, texture change, etc. (Yash)
- goal: polished static scene with functional interactivity elements
We also encouraged everyone in the group to submit a scan of a toy or other object to include in our virtual room. I built a creepy whimsical puppet a little over a year ago and already have a scan of it that I've cleaned up and rigged, so I decided to send that along.
THIS WEEK:
SATURDAY (3/2):
SEWING:
On Saturday, I spent the entire day working on the bodysuit. At home, I did all the alterations Cindy had requested to bring the suit in, and trimmed out excess fabric. I made sure to use zigzag stitches both to accommodate the stretching of the spandex, and to serve as finishing edges. The goal was to make it as form fitting as possible, to be read clearly by the kinetic sensors, while still accommodating movement and taking it on/off.
 |
| Some of the alterations in progress, working on the hand and wrist contours |
CONDUCTIVE TAPE:
I then met up with Preeti in the classroom from 1pm to 5:30pm. We worked together to integrate our idea for where the 12 sensors would be placed around the body with Vivian's idea for how the different areas of discomfort would be determined. Here are the two elements we were combining, and then my design:
Vivian's areas of discomfort

Preeti's sensor placement

My integration of areas of discomfort and sensor placement

Preeti was very kind to wear the suit for me so that I could start applying the conductive tape covering each of the sensor areas. I tried to emulate the shapes of a circuit board to 1.) provide visual interest and make the exposed tape look intentional and artistic, 2.) tie in visually with the technological aspect of the project and the interplay between the human form and objectification and 3.) to disguise the gaps between the different sections of sensor so that audience members/participants will have a more difficult time determining how the suit works.
I finished the tape work on the right hand, forearm, and upper arm/shoulder. I then carefully stitched a line of conductive thread connecting to the hand, going all the way up the arm, around the back, and down the length of the zipper to where the 12 point capacitive touch sensor will be housed.
Preeti modeling the arm design

The original conductive thread stitching following the suit's aesthetic

This is where we ran into a problem. When we connected the sensor to the end of the thread, we could only pick up the touch in the hand a small portion of the time. It was very inconsistent and unstable- too unreliable for use in the project. After all the time I'd spent stitching, I was very disappointed. We decided to throw in the towel for the day and bring the suit to the Sunday meeting the next day to ask for the wisdom of the crowd and see if anyone else in the group who was better at technology had any ideas.
SUNDAY (3/3):
GETTING THE TOUCH SENSOR TO WORK:
I was in the motion capture lab today from 1:30pm to 6:45pm. Nick, Lara, and Yash were fighting with the other computer systems, but I spent basically the entire time trying to get the touch sensors to work accurately and reliably.
We discovered that there's a tiny reset button on the adafruit 12 point capacitive touch sensor itself, and that we need to make sure we're not touching the tape or wires or sensor anywhere and then press it after get everything wired together. Apparently we were having a problem because we were already touching the tape when we plugged the sensor in, so what should have been its baseline "no conductivity" value was accidentally set to the value of the arm being touched. By resetting, it sets that back to zero so that when you start touching it again, there's actually a differential. Hooray!
We plugged it in to touch designer and were able to get it to consistently read values!!! HOORAY!!!
Touching the tape and consistently returning values in touch designer

TAPING THE OTHER ARM:
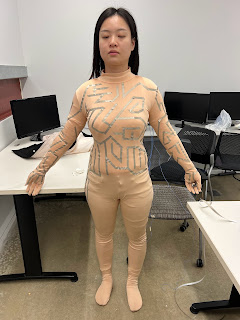
The other big thing I did today was decorating the entire left arm. As with the right, I split it into 3 sections- the hand, the forearm, and the upper arm/shoulder- and did my best to disguise the boundaries between each section using the asymmetrical pattern of the pseudo-circuitry. Cindy, our lovely model/performer, was kind enough to wear the suit for me and pose so that the suit was adequately stretched while I worked on it.
The unfortunate discovery we made was that our single roll of tape was wildly insufficient. It was perfect for covering the two arms, but wholly inadequate for covering the whole suit. I instructed Lauren on how to order 3 more rolls for us to make sure we have plenty to cover the chest, stomach, back, and legs.
Arms and shoulders fully covered with 6 sections



The next step is to stitch the wires to the inside and stitch the tape together in several places so that it doesn't pull or peel up at tension points when Cindy moves. I'll be using regular thread for that, not conductive, so that it doesn't accidentally connect to Cindy's skin and fire the sensors erroneously.
MONDAY (3/4):
We were in the lab today from 6pm to 10:30pm, much to my extreme displeasure. We got it all working through!!
I personally hand stitched the entirety of one of the wires inside, and measured out and arranged all of the other wires to connect the 6 existing touch zones. The adafruit is connected just through twisting the wires for now- it can't be soldered until the wires are all stitched to the suit interior, at which point the connections will become much more reliable and the
Things we accomplished:
- Hand stitched the entirety of the right arm hand wire into the interior of the suit
- Wired together 6 sections of the suit to 6 different triggers
- Build and decorated 3D stage in Unreal
- Different values assigned to different areas working
- Environment effects responding to touch values
- Puppet responding to kinetic sensor input and tracking accurately
- All sound triggers working and responding to touch
PHOTOS OF THE PROGRESS:
Experiencing stages of despair on the lab floor at 9pm
Wires on the exterior of the suit, labelled and connected to 12p sensor


Cindy wearing the suit

Gotta stitch all the wires to the inside so that I can thread them through the fabric and solder them. Time consuming..... pray for us.
IT'S WORKING THOUGH!!!!!!! Video evidence of the project in motion!!!!

Comments
Post a Comment